随着通信技术和计算机技术的飞速发展,多智能体系统的协同控制受到学术界及工业界的广泛关注,并被成功应用于多无人水面船的编队控制、无人机群的编队飞行、无线传感器网络的多节点信息融合等。作为多智能体系统协同控制的基础,一致性问题旨在利用智能体网络的局部信息设计分布式通信协议,从而使所有智能体的状态或输出趋于共同的值。
近日,夏桂华教授等在国际期刊International Journal of Robustand Nonlinear Control(JCRQ1区,IF=3.953)发表文章(29 (15),5227-5250,2019),提出了一种非线性奇异多智能体系统的保性能协同一致性追踪控制方法。据悉,该方法通过利用非奇异变换技术和保性能控制策略,实现通讯拓扑切换条件下多智能体网络的一致性追踪。
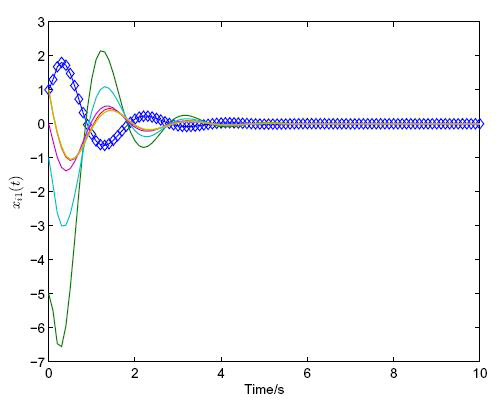
图1系统状态xi1 (t),i=0,1,L 5.
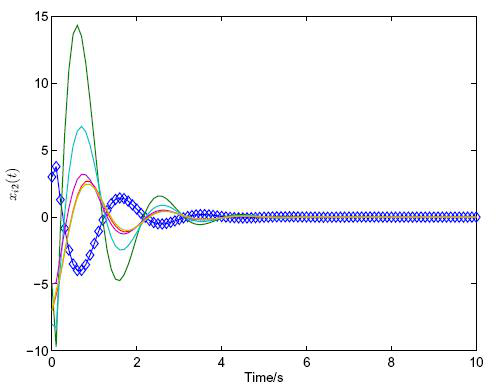
图2系统状态xi2(t),i=0,1,L 5.
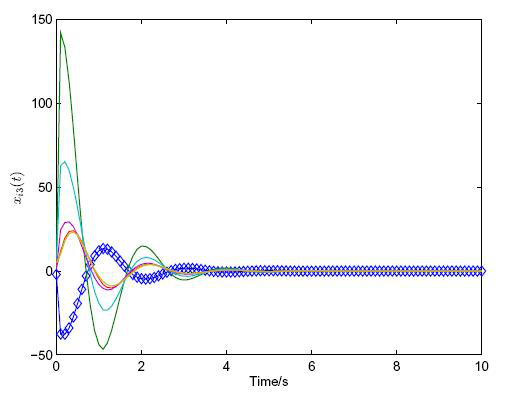
图3系统状态xi3 (t),i=0,1,L 5.
文中指出,该方法可以有效地消除切换拓扑和Lipschitz非线性对系统一致性的影响。通过将一致性追踪控制问题转化为较低维数等价切换奇异系统的可容许性分析问题,在线性矩阵不等式框架下成功设计了一致性协议,并给出了性能函数的精确表达式。
论文链接:https://doi.org/10.1002/rnc.4670