近年来,随着世界各国对海洋资源的不断开发和深海领域的积极探索,水下无人航行器(Unmanned Underwater Vehicle, UUV)作为一类集无人自主化、网络信息化和AI智能化发展的新型海洋战略装备而备受关注。与此同时,由于UUV复杂多任务的大量应用,例如水下归航与回坞、路径跟随、动目标追踪等,使得对其导航、制导与控制技术也提出了新的挑战。UUV三维空间运动与控制技术更是其能否成功完成水下特种作业任务的基础,但遗憾的是现有理论成果大多聚焦于UUV全驱动控制,亦惑停留于欠驱动UUV三自由度平面运动,鲜有三维欠驱动控制成果。
近日,严浙平教授团队在国际期刊Journal of the Franklin Institute(JCR一区,IF=3.653)上发表新文章(DOI:10.1016/j.jfranklin.2018.11.042),提出一种新颖的欠驱动UUV自主归航任务下综合制导与控制策略,使得欠驱动UUV能够在制导系统作用下,按照指定回坞参考轨迹,自主返回并抵近最终回坞点。
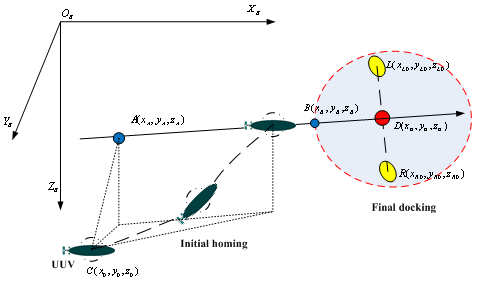
UUV归航与回坞方案示意图
所提出的综合制导与控制策略,将整个UUV的归航与回坞任务分解为两个明显的阶段:1)在初始归航中,UUV一般处于定常高速运动,其动力学方程往往是欠驱动的,期望参考轨迹如图直线AB所示,其前进方向垂直于两个水声信号收发器 和的连线;2)在最终回坞阶段,UUV一般以低速状态抵近最终回坞点,其动力学方程通常假设是全驱动的,其控制方案类似于动力定位。
和的连线;2)在最终回坞阶段,UUV一般以低速状态抵近最终回坞点,其动力学方程通常假设是全驱动的,其控制方案类似于动力定位。
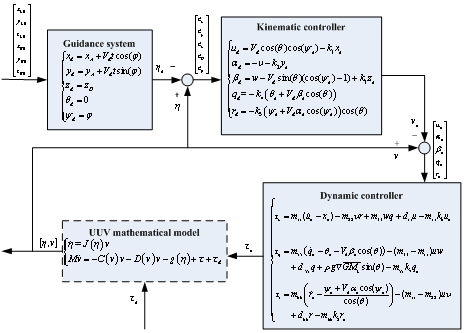
欠驱动UUV三维空间运动控制器框图
论文的主要贡献与创新在于:1)UUV制导系统产生的期望参考轨迹不依赖于航行器模型及任何假设条件;2)基于反步设计的三维运动控制器,保证了欠驱动UUV在轨迹跟踪任务中,对位置、姿态以及速度的“时空”关系。所提出的欠驱动UUV三维空间轨迹跟踪控制方法,不仅仅适用于水下航行器自主归航任务,同样可扩展到水下动目标追踪等,为其更好的实践应用奠定了理论基础。
论文链接:
https://www.sciencedirect.com/science/article/pii/S0016003219301838